Written by Natesh Narain
on
on
Fire Fighting Robot!
Decided I needed to get my fire fighting robot up here (Highschool computer tech project from 2013)!
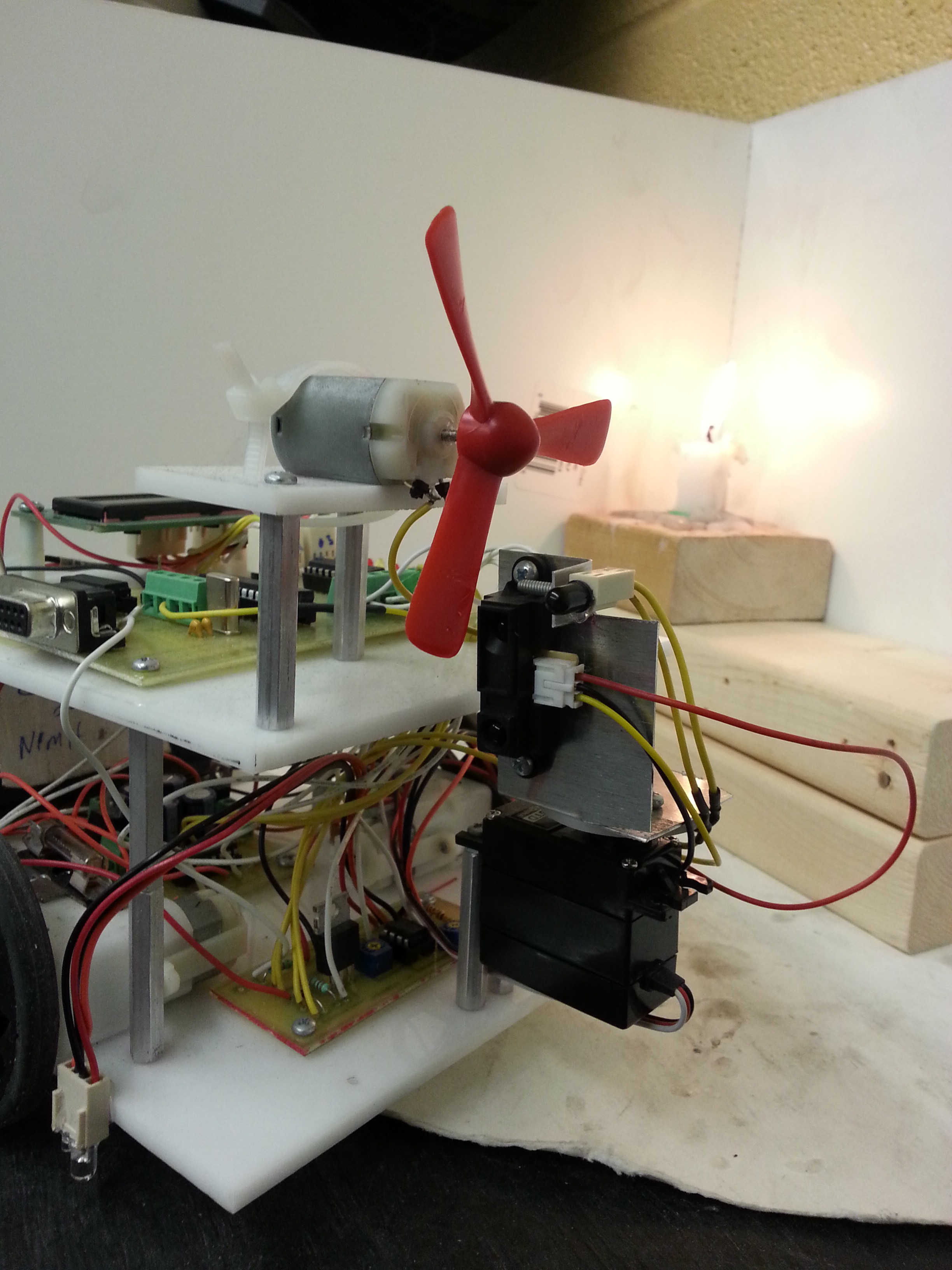
Equiped with two DC motors, servo, infrared range finder and a fan, this robot can navigate a mazed and extinguish a candle!
Video of it in action:
Also found the MBasic code!
CPU = 16F876A
MHZ = 20
CONFIG 16242
; Fire Fighter, TEJ4MI 2012 - 2013
; This program will navigate our bot through the maze, search each room
; for the fire, extinguish the fire and return home.
; Author : Natesh Narain, Ibrahim Naamani
; version : 0.8.3
; Date Created : December 20 2012
; Last Modified : January 16 2013
; Analog to Digital setup ---
AN0 con 0
AN1 con 1
CLK con 2
ADSETUP con %10000100
; Analog input ---
wall_in var word ; Wall sensor input
candle_in var word ; Candle sensor input
; Servo ---
position_90 var word ; Pulse duration to position servo straight forwards
position_0 var word ; Pulse duration to position servo to left of bot
position_180 var word ; Pulse duration to position servo to right of bot
position_current var word ; Current position of servo used when sweeping
counter var byte ; Counter used in servo for loops
; Various Constants ---
delay_line_clearence var word ; Delay to clear the line
gap var word ; This value is added\subtracted from the wall distance so...
; that the bot has a "gap" where it moves forward
extinguish_range var word ; Range bot must be in to extinguish candle
extinguish_value var word
; Measurements ---
wall_distance var word ; Distance from wall bot starts at
wall_distance_right var word ; Distance from right of bot
wall_distance_left var word ; Distance from left of bot
wall_snapshot var word ; Distance used to make a 180
room_width_right var word ; Distance to end of room to right of bot
room_width_left var word ; Distance to end of room to left of bot
room_width var word ; Room_width_right - room_width_left
room_length var word ; Approximate distance from end
candle_snapshot var word
candle_distance var word ; Distance candle is from bot, when bot first finds candle
; Trackers ---
in_room var bit ; Keeps track of whether or not bot is in a room or not
candle_in_room var bit ; Keeps track of whether candle is in room or not
candle_on_right var bit ; Keeps track of where candle is
candle_on_left var bit ; Keeps track of where candle is
candle_is_out var bit ; Used to check if candle is out
candle_zone var bit ; Used to check if bot is in white ring around candle
candle_was_in_room var bit ; Used to determine which exit sub-routine to use
extra_sweep var bit ; Tells bot to do a more thorough sweep of room --- REMOVE!!!
line_left_tracker var bit ; Keeps track of if the left of bot goes over line
line_right_tracker var bit ; Keeps track of if right of bot goes over line
exit_left var bit ; Tells bot to turn left after room exit
exit_right var bit ; Tells bot to turn right after room exit
room_counter var nib ; Counts number of rooms entered
sweep_position var byte ;
mission_complete var bit ; Fire has been extinguished
; Intialize LCD
LCDWRITE B4\B5\B6, portb.nib0, [INITLCD1, INITLCD2, TWOLINE, CLEAR, HOME, SCR]
; Setup before main loop ---
gosub leds_off
gosub init_vars
gosub record_distance
; Main loop start ----------------------------------------------------->
main
; Clear LCD
LCDWRITE B4\B5\B6, portb.nib0, [ CLEAR ]
; If bot is not in room
if in_room = 0 then
gosub forwards ; Head straight forwards
gosub hug_wall ; Follow along the right wall
gosub check_for_entrance ; Check for the entrance of room
endif
; When bot is in a room
if in_room = 1 then
gosub stop_motors ; Do a full stop
; gosub get_room_dimensions
gosub sweep2 ; Scan for candle
; Candle is in room
if candle_in_room = 1 then
gosub align_with_candle ; Line up with the candle
gosub approach_candle ; Move towards candle
gosub extinguish2 ; And blow out the candle
candle_in_room = 0 ; Candle is no longer in room
candle_was_in_room = 1 ;
endif
; Candle is not in room
if candle_in_room = 0 then
; If candle was not in the room, which means bot has not moved
if candle_was_in_room = 0 then
gosub exit_room_from_entrance ; Exit the room (knowing bot is at entrance)
candle_was_in_room = 0
endif
if candle_was_in_room = 1 then
candle_was_in_room = 0
endif
in_room = 0 ; Bot no longer in room
endif
endif
goto main
; Subroutines ---
; Sweeps servo from 0 to 180
; sweep
; Sweep servo from 0 to 180
; for position_current = position_0 to position_180 step 100
; Positions servo at the current position
; for counter = 0 to 50 step 1
; pulsout a5, position_current
; pause 20
; Find which side of bot candle is on
; gosub determine_candle_location
; next
; next
; After the servo completes sweep, rotate to 90
; gosub rotate_90
; return
sweep2
; Rotate to right, starting point of sweep
gosub rotate_0
; Rotates to left
for counter = 0 to 100 step 1
pulsout a5, position_180
gosub update_analog_input
if candle_in <= 50 then
gosub determine_candle_location2
candle_snapshot = candle_in
endif
next
gosub rotate_90
return
; Will determine which side of bot candle is on
; determine_candle_location
; If candle input is nearly zero. (Not exactly because it might not go to exactly zero)
; if candle_in < 200 then
; Uses 90 degrees to determine which side of bot candle is on
; if position_current < position_90 then
; candle_on_right = 1 ; might have to switch
; candle_in_room = 1
; endif
; if position_current > position_90 then
; candle_on_left = 1 ; might have to switch
; candle_in_room = 1
; endif
; endif
; Candle isn't on either side of room
; if candle_on_right = 0 and candle_on_left = 0 then
; candle_in_room = 0
; endif
; return
; uses for loop counter variable to determine candle location
determine_candle_location2
sweep_position = counter
if counter < 50 then
candle_on_right = 1
elseif counter > 50
candle_on_left = 1
endif
if candle_in < 50 then
candle_in_room = 1
endif
if candle_in > 900 then
candle_in_room = 0
endif
return
; Lines bot up with candle
align_with_candle
if sweep_position >= 80 then
gosub forwards
pause 500
elseif sweep_position <= 20
gosub forwards
pause 500
endif
gosub stop_motors
if candle_on_left = 1 then
; Rotate left until candle sensor sees candle
repeat
gosub turn_left
gosub update_analog_input
until candle_in <= 50 ; candle_snapshot
gosub stop_motors
endif
if candle_on_right = 1 then
; Rotate right until candle sensor sees candle
repeat
gosub turn_right
gosub update_analog_input
until candle_in <= 50 ; candle_snapshot
gosub stop_motors
endif
return
approach_candle
repeat
gosub forwards
gosub check_for_entrance ; rename this sub-routine
until candle_zone = 1
gosub stop_motors
return
; Bot will find its way out of room
exit_room
return
; This subroutine is called when bot has determined that there is no candle in the room
exit_room_from_entrance
; Face left wall and get distance from bot
gosub rotate_180
gosub update_analog_input
wall_snapshot = wall_in
; Face right, this is so bot can wall hug after the 180
gosub rotate_0
; Turn left until wall sensor is same distance from wall as before
repeat
gosub turn_left
gosub update_analog_input
until wall_in >= wall_snapshot
wall_snapshot = 0
gosub forwards
pause 1000 ; Clear the line
gosub stop_motors
; gosub turn_left
; pause 600
gosub determine_exit_direction
return
back_track
repeat
gosub backwards
gosub update_analog_input
until wall_in <= candle_distance
return
; Determines which direction bot should turn after exit
determine_exit_direction
; Determine distance from bots right
gosub rotate_0
gosub update_analog_input
wall_distance_right = wall_in
; Determine distance from bots left
gosub rotate_180
gosub update_analog_input
wall_distance_left = wall_in
gosub rotate_90
; Sets the corresponding tracker to which ever distance is greater,
; the reason for this is based off the layout of the maze
if wall_distance_left > wall_distance_right then
; exit_left = 1
repeat
gosub turn_right
gosub update_analog_input
until wall_in <= wall_distance_right
elseif wall_distance_left < wall_distance_right
;exit_right = 1
repeat
gosub turn_left
gosub update_analog_input
until wall_in <= wall_distance_left
endif
pause 100
gosub stop_motors
; Finishing by pointing servo right
gosub rotate_0
return
; Gets length and width of room
get_room_dimensions
; Distance from bot's right
gosub rotate_0
gosub update_analog_input
room_width_right = wall_in
; Distance straight ahead of bot
gosub rotate_90
gosub update_analog_input
room_length = wall_in
; Distance to bot's left
gosub rotate_180
gosub update_analog_input
room_width_left = wall_in
; Actual distance of room
room_width = room_width_right - room_width_left
return
; Runs the fan until the candle is out
extinguish
repeat
high b7
gosub update_analog_input
until candle_in > 950
low b7
return
extinguish2
candle_is_out = 0
repeat
repeat
high b7
gosub update_analog_input
until candle_in > extinguish_value
low b7
pause 400 ; This will allow enough real world time to pass to see if the
; candle will continue to burn
gosub update_analog_input
if candle_in < 800 then
candle_is_out = 0
endif
if candle_in > extinguish_value then
candle_is_out = 1
endif
until candle_is_out = 1
return
; Checks for line to entrance, and will set corresponding tracker to save the bot's state
; (In room or not in room)
check_for_entrance
gosub check_line_left
gosub check_line_right
; Checks if bot has crossed line
if line_left_tracker = 1 and line_right_tracker = 1 then
; Checks if bot is not in room
if in_room = 0 then
in_room = 1
room_counter = room_counter + 1
; Checks if bot is in room
elseif in_room = 1
; in_room = 0
candle_zone = 1
endif
line_left_tracker = 0
line_right_tracker = 0
endif
return
; Checks Left side of bot for line
check_line_left
; Check left side
if portc.bit0 = 1 then
line_left_tracker = 1
; Checks right side
if portc.bit1 = 0 then
; Lets right side catch up
repeat
gosub stall_left
until portc.bit1 = 1
line_right_tracker = 1
; Resumes left motor
; gosub motor_left_forwards
gosub forwards
; Clears the line
pause delay_line_clearence
endif
endif
return
; Checks right side of bot for line
check_line_right
; Checks right
if portc.bit1 = 1 then
line_right_tracker = 1
; Checks left
if portc.bit0 = 0 then
; Lets left side catch up
repeat
gosub stall_right
until portc.bit0 = 1
line_left_tracker = 1
endif
; Resumes right motor
;gosub motor_right_forwards
gosub forwards
; Clears the line
pause delay_line_clearence
endif
return
; Adjusts bots path, to follow along side a wall
hug_wall
gosub update_analog_input
; Checks if bot is too close to wall
if wall_in > wall_distance then
; Move away from wall
repeat
gosub stall_left
gosub update_analog_input
until wall_in <= wall_distance + gap
endif
; Checks if bot is to close to wall
if wall_in < wall_distance then
; Move towards wall
repeat
gosub stall_right
gosub update_analog_input
until wall_in >= wall_distance - gap
endif
return
; Updates analog values
update_analog_input
ADIN AN1,CLK,ADSETUP,wall_in ; Update wall sensor
ADIN AN0,CLK,ADSETUP,candle_in ; Update candle sensor
gosub display_readings ; Print info to LCD
return
; Writes to LCD. Short forms are used so that all reading can be displayed at once
display_readings
; LCDWRITE B4\B5\B6, portb.nib0, [scrram+$0, "W- "] ; "W" short for wall
; LCDWRITE B4\B5\B6, portb.nib0, [dec wall_in] ; Wall sensor input
; LCDWRITE B4\B5\B6, portb.nib0, [scrram+$40," WS- "] ; "WD" short for wall distance
; LCDWRITE B4\B5\B6, portb.nib0, [dec wall_snapshot] ; Initial distance measurement
LCDWRITE B4\B5\B6, portb.nib0, [scrram+$0, "C- "] ; "C" short for candle
LCDWRITE B4\B5\B6, portb.nib0, [dec candle_in] ; Candle sensor input
; LCDWRITE B4\B5\B6, portb.nib0, [scrra+$0, "> "]
; LCDWRITE B4\B5\B6, portb.nib0, [dec candle_in_room]
; LCDWRITE B4\B5\B6, portb.nib0, [scrram+$40, "CO- "]
; LCDWRITE B4\B5\B6, portb.nib0, [dec candle_is_out]
; LCDWRITE B4\B5\B6, portb.nib0, [scrram+$0, "CoL - "]
; LCDWRITE B4\B5\B6, portb.nib0, [dec candle_on_left]
; LCDWRITE B4\B5\B6, portb.nib0, [scrram+$40, "CoR - "]
; LCDWRITE B4\B5\B6, portb.nib0, [dec candle_on_right]
LCDWRITE B4\B5\B6, portb.nib0, [scrram+$40, "CS- "]
LCDWRITE B4\B5\B6, portb.nib0, [dec candle_snapshot]
return
; Gets an initial distance from wall and uses that to guide itself
record_distance
ADIN AN1,CLK,ADSETUP,wall_in
gosub rotate_0
pause 100 ; Reconsider a pause in this subroutine -------------------------------------------------------------
wall_distance = wall_in
return
; Faces servo straight ahead
rotate_90
for counter = 0 to 50 step 1
pulsout a5, position_90
pause 20
next
return
; Faces servo to left of bot
rotate_180
for counter = 0 to 50 step 1
pulsout a5, position_180
pause 20
next
return
; Faces servo to right of bot
rotate_0
for counter = 0 to 50 step 1
pulsout a5, position_0
pause 20
next
return
forwards
gosub motor_left_forwards
gosub motor_right_forwards
return
motor_left_forwards
low c2
high c3
return
motor_right_forwards
high c4
low c5
return
backwards
gosub motor_right_backwards
gosub motor_left_backwards
return
motor_right_backwards
low c4
high c5
return
motor_left_backwards
high c2
low c3
return
turn_right
gosub motor_left_forwards
gosub motor_right_backwards
return
turn_left
gosub motor_right_forwards
gosub motor_left_backwards
return
stop_motors
gosub stall_left
gosub stall_right
return
stall_left
low c2
low c3
return
stall_right
low c4
low c5
return
; Initialize all variables
init_vars
position_90 = 1760
position_180 = 2500
position_0 = 900
position_current = 0
candle_in_room = 0
candle_on_left = 0
candle_on_right = 0
candle_zone = 0
candle_was_in_room = 0
candle_snapshot = 0
delay_line_clearence = 200
gap = 100
extinguish_range = 100
extinguish_value = 930
wall_distance_right = 0
wall_distance_left = 0
wall_snapshot = 0
in_room = 0
line_left_tracker = 0
line_right_tracker = 0
room_counter = 0
sweep_position = 0
mission_complete = 0
return
; When the motherboard first starts up all the LEDs are on
leds_off
low a5
low b7
low c2
low c3
low c4
low c5
return
Connected Posts
1 post references this page