on
ROS Development Environment on Windows 10 using Docker
Recently I got my hands on a iRobot Create 2 from work and have been spending some of my time recently setting it up with ROS.
The following is how I’ve setup my ROS development environment on Windows 10.
Building Docker Images
Ultimately, I want to deploy a ROS bundle to a Raspberry PI connected to the Create 2. However, compiling on the Raspberry PI is painfully slow. My plan is to cross-compile an arm64 ROS bundle inside of a docker container and load that on the PI.
At the moment, I’m still working in simulation but wanted to give context to how I’ve structured the docker images.
There are official ROS docker containers on docker hub. All of my containers derive from these base containers.
My containers are split into base, desktop and dev.
| Image | Platform | From | Description |
|---|---|---|---|
| ros-base | amd64/arm64 | ROS_DISTRO-ros-base | ROS_DISTRO + tools, usable on amd64 and arm64 |
| ros2-base | amd64/arm64 | ROS_DISTRO-ros-base | ROS2_DISTRO + tools, usable on amd64 and arm64 |
| ros-desktop | amd64 | ros-base | ros-base + SIM tools (gazebo) |
| ros2-desktop | amd64 | ros2-base | ros2-base + SIM tools (gazebo) |
| ros-dev | amd64 | ros-desktop | ros-desktop + development tools |
| ros2-dev | amd64 | ros2-desktop | ros2-desktop + development tools |
base containers are intended to be a minimal ROS environment with tools installed that allow the building of a deployable bundle (on amd64 or arm64).
Sticking with ROS 1 for now, the base container is simply:
FROM ros:melodic-ros-base
RUN apt-get update \
&& apt-get install -y python3-apt python3-pip \
&& pip3 install catkin-tools
The desktop container (deriving from the base image):
FROM nnarain/ros-base:latest
RUN echo 'Etc/UTC' > /etc/timezone && \
ln -sf /usr/share/zoneinfo/Etc/UTC /etc/localtime && \
apt-get update && \
apt-get install -q -y --no-install-recommends tzdata && \
rm -rf /var/lib/apt/lists/*
# Install desktop tools packages
RUN apt-get update \
&& apt-get install -y ros-${ROS_DISTRO}-gazebo-ros-pkgs \
&& apt-get install -y ros-${ROS_DISTRO}-rviz \
&& apt-get install -y ros-${ROS_DISTRO}-rqt ros-${ROS_DISTRO}-rqt-common-plugins \
&& apt-get install -y ros-${ROS_DISTRO}-rqt-tf-tree
The dev image derives from the desktop image and installs various tools that I use:
FROM nnarain/ros-desktop:latest
ENV SCRIPTS_DIR /tmp/scripts
# Copy over setup scripts
COPY ./common/* ${SCRIPTS_DIR}/
RUN export PATH=$PATH:/tmp/scripts
# Setup dev environment
RUN apt-get update \
&& sh ${SCRIPTS_DIR}/setup-common.sh ${SCRIPTS_DIR} \
&& rm -rf /tmp/scripts
Vscode Setup
I use vscode’s remote development package that allows working inside of a docker container. The following is the contents of devcontainer.json:
{
"name": "iRobot Create 2",
"image": "nnarain/ros-dev:latest",
"extensions": [
"ms-vscode.cpptools",
"twxs.cmake",
"ms-python.python",
"ms-python.vscode-pylance",
]
}
C++ intellisense config
{
"configurations": [
{
"browse": {
"databaseFilename": "${default}",
"limitSymbolsToIncludedHeaders": true,
"path": [
"/opt/ros/melodic/include/",
"/workspaces/create_ws/devel/include/",
"/workspaces/create_ws/src/**",
"/usr/include/**"
]
},
"includePath": [
"/opt/ros/melodic/include/",
"/workspaces/create_ws/devel/include/",
"/workspaces/create_ws/src/**",
"/usr/include/**"
],
"name": "ROS",
"intelliSenseMode": "${default}",
"compilerPath": "${default}",
"cStandard": "gnu11",
"cppStandard": "c++11"
}
],
"version": 4
}
I set browse.path and includePath to the same paths.
/opt/ros/melodic/include/- ROS include directory/workspaces/create_ws/devel/include/- workspace include directory for built message types or other generated headers/workspaces/create_ws/src/**- recursive search the src directory of the workspace for local include files/usr/include/**- recursive search installed libraries (tf and pcl are installed here)
Two other important fields:
"cStandard": "gnu11",
"cppStandard": "c++11"
The cppStandard field must be set to c++11 not gnu11, which is what it might be auto-set to. If it is not intellisense will not work correctly.
GUIs
In order to use tools like Gazebo and Rviz an X server is required to run on the Windows host.
- Install
vcxsrv - Set the
DISPLAYenvironment variable inside the docker container to<host-ip>:0.0 - Launch vcxsrv and config according to the following screen shot
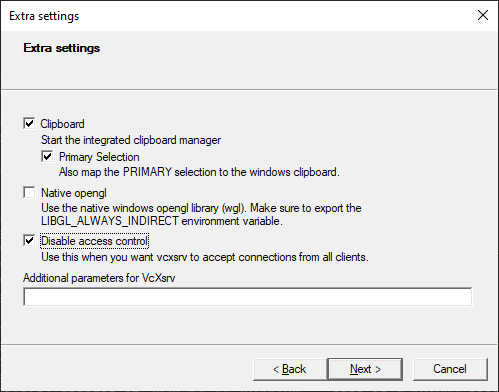
As far as I’ve been able to figure out, GUI tools inside the container will be using software rasterization, meaning the FPS will be fairly low. It’s still usable but not ideal. I’d like to figure out if there is a way to use hardware accelerated graphics.
1 post references this page