on
Interfacing with ESCs
Given the failure to get significant lift from using small brushed DC motors mentioned in a previous post, I’m opting to interface with real drone hardware.
Now, I was originally trying to avoid this since there are many options and it’s somewhat hard to sort through everything. However, I realized that for ESCs it is hard to go wrong when it comes to finding something that will work with a generic flight controller.
So might as well get started somewhere..
What is an ESC?
OK so first off, what is an ESC? ESC stands for “Electronic Speed Controller”. They are used to control brushless DC motors (like the kind used in drones).
Types of ESCs
They come in a few different varieties and interfacing options. Some are dedicated for a single motor. Others are 4-in-1 ESCs in single package.
I’m using a 4-in-1 ESC using the BLHeli_32 firmware (Specifically a Diatone Mamba F40 40A 6S BLS 4-in-1 ESC ).
BLHeli_32
BLHeli_32 seems to be the most common ESC firmware available. It handles controlling the motors and can take a variety of input options.
For example:
- OneShot
- MultiShot
- DShot 150/300/600/1200
- PWM
BLHeli_32 can actually auto detect the input signal at startup. So while my ESC board description says it supports DSHOT 300/600 it actually supports PWM as well, without any other configuration as far as I can tell.
I selected the ESP32-C3 for Icarus with PWM control in mind. Though it seems DShot would be a better long term option. However, the ESP32-C3 doesn’t have enough peripherals to support 4x Dshot outputs.
BLHeli_32 Arming Sequence
The ESC firmware needs to be explicitly armed before it will start driving the motors.
The arming process is pretty straight forward. See the BLHeli_32 manual below:
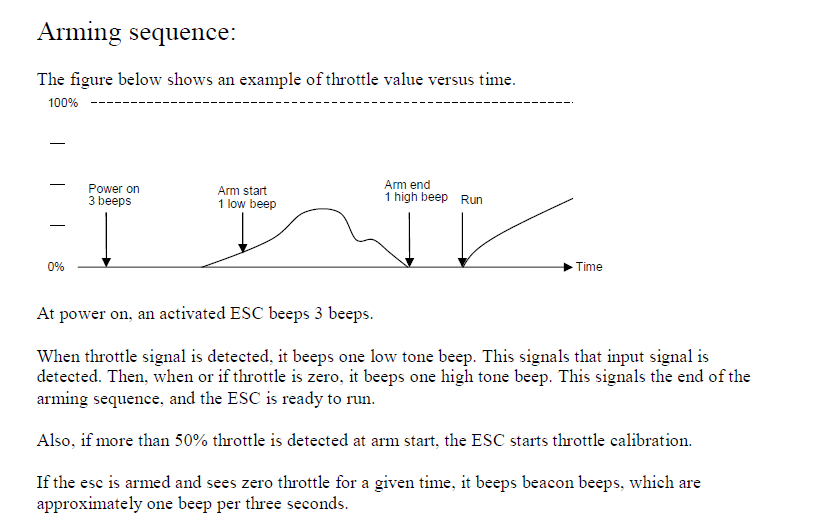
In summary:
- 3 beeps at start up
- 1 beep to confirm throttle signal detected
- 1 beep to confirm a throttle of zero commanded.
- The actual waveform of the throttle depends on the protocol used
At this point the ESC is ready to drive the motors.
PWM Control
I wanted to test DShot control as well, so I’m using a PlatformIO project setup to test everything using the Arduino Framework.
I’m using my ESP32-C3 dev board to test
#include <Arduino.h>
#define LED_PIN GPIO_NUM_7
#define RTRCTL GPIO_NUM_10
#define LEDC_CHNL 0
uint16_t throttle = 0;
unsigned long start_ms = 0;
void setup() {
pinMode(LED_PIN, OUTPUT);
digitalWrite(LED_PIN, LOW);
// Setup LEDC channel with 200Hz and 8-bit resolutions
ledcSetup(LEDC_CHNL, 200, 8);
// Attach rotor control output pin to the LEDC channel
ledcAttachPin(RTRCTL, LEDC_CHNL);
// Set initial duty cycle for zero throttle
throttle = 51;
ledcWrite(LEDC_CHNL, throttle);
}
void loop() {
// Wait 3s. Then set duty cycle to max throttle
const auto now = millis();
if (now >= start_ms + 3000)
{
throttle = 102;
digitalWrite(LED_PIN, HIGH);
}
ledcWrite(LEDC_CHNL, throttle);
}
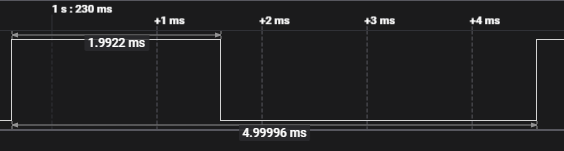
For PWM control the ESC expects a pulse width of 1ms - 2ms (like a typical RC servo).
For some reason I haven’t figured out the ESP32-C3’s LEDC peripheral won’t output a signal below 200Hz. So I had to calculate the duty cycle to achieve the desired pulse width.
200Hz -> 5ms
8-bit resolution -> 255 steps
5ms / 255 -> 0.0196078431372549 ms per step
Max Throttle -> 2ms pulse width
2ms / 0.0196078431372549 = 102
Min Throttle -> 1ms pulse width
1ms / 0.0196078431372549 = 51
Confirming PWM output:
The code above is able to arm and drive the motor at full throttle. Though I don’t have a great test setup for everything at the moment.
DShot Control
As mentioned above, DShot seems like the better long term option. It supports direction reversing, telemetry and other functionality.
While my flight controller design can’t drive 4x dshot outputs, I thought I’d see if I could still get it going.
#include <Arduino.h>
#include <DShotRMT.h>
#define LED_PIN GPIO_NUM_7
#define RTRCTL GPIO_NUM_10
#define RTRCTL_RMT_CHNL RMT_CHANNEL_1
DShotRMT dshot(RTRCTL, RTRCTL_RMT_CHNL);
uint16_t throttle = 0;
unsigned long start_ms = 0;
void setup() {
pinMode(LED_PIN, OUTPUT);
digitalWrite(LED_PIN, LOW);
dshot.begin(DSHOT600);
start_ms = millis();
}
void loop() {
const auto now = millis();
if (now >= start_ms + 3000)
{
throttle = 1000;
digitalWrite(LED_PIN, HIGH);
}
dshot.send_dshot_value(throttle);
delay(1);
}
I’m using this library https://github.com/derdoktor667/DShotRMT.git to implement the DShot protocol. It uses the ESP32-C3’s RMT module.
Future Work
- Need to get the motors at least partially assembled to the frame to make things easier to test
- Get the other motors working
- Port to Rust
1 post references this page