This post will cover visualizing sensor data collected over Bluetooth from the controller.
Graphics Library
Bevy seems to be the all around best choice for graphics in Rust these days. Combined with egui (an ImGUI like immediate mode UI library) it makes for a really easy to set up UI with custom graphics.
Mixing Synchronous and Asynchronous Rust
The bluetooth client library I’m using is async based and bevy is not so the two need to be linked together in some way.
This can be done with tokio and constructing an async runtime on a dedicated thread.
pub struct IcarusPlugin;
impl Plugin for IcarusPlugin {
fn build(&self, app: &mut App) {
// Setup data channels to communicate with the async runtime
let (attitude_tx, attitude_rx) = mpsc::channel::<Attitude>(50);
let channels = Channels { attitude: attitude_rx };
// Spawn the async runtime
thread::spawn(|| icarus_async_runtime(attitude_tx));
// ...
// Add the data channels to bevy's resource manager
app
// ...
.insert_resource(channels)
}
}
/// Build async runtime to run bluetooth client
fn icarus_async_runtime(tx: Sender<Attitude>) -> anyhow::Result<()> {
// Spawn an async runtime to collect sensor and state data
let runtime = Builder::new_current_thread().enable_all().build()?;
runtime.block_on(collect_icarus_data(tx))?;
Ok(())
}
async fn collect_icarus_data(tx: Sender<Attitude>) -> anyhow::Result<()> {
let (mut attitude, _) = icarus_client::initialize().await?.split();
while let Some(attitude) = attitude.recv().await {
if let Err(e) = tx.send(attitude).await {
log::error!("Error sending data: {}", e);
}
}
Ok(())
}
Channels are used to pass data from the async runtime. The channels are registered as a global resource within bevy.
impl Plugin for IcarusPlugin {
fn build(&self, app: &mut App) {
// ...
// Buffers for sensor data
let attitude_sensor: SensorBuffer<Attitude> = SensorBuffer::new(250);
let sensors = Sensors {attitude: attitude_sensor};
// Add the data channels to bevy's resource manager
app
// ...
.insert_resource(channels)
.insert_resource(sensors)
.add_system(update_sensors_system)
}
}
fn update_sensors_system(mut channels: ResMut<Channels>, mut sensors: ResMut<Sensors>) {
while let Ok(data) = channels.attitude.try_recv() {
sensors.attitude.push(data);
}
}
A ringbuffer is used to store sensor data (also added as a bevy resource). A system is used to move data from the channels to the ringbuffer.
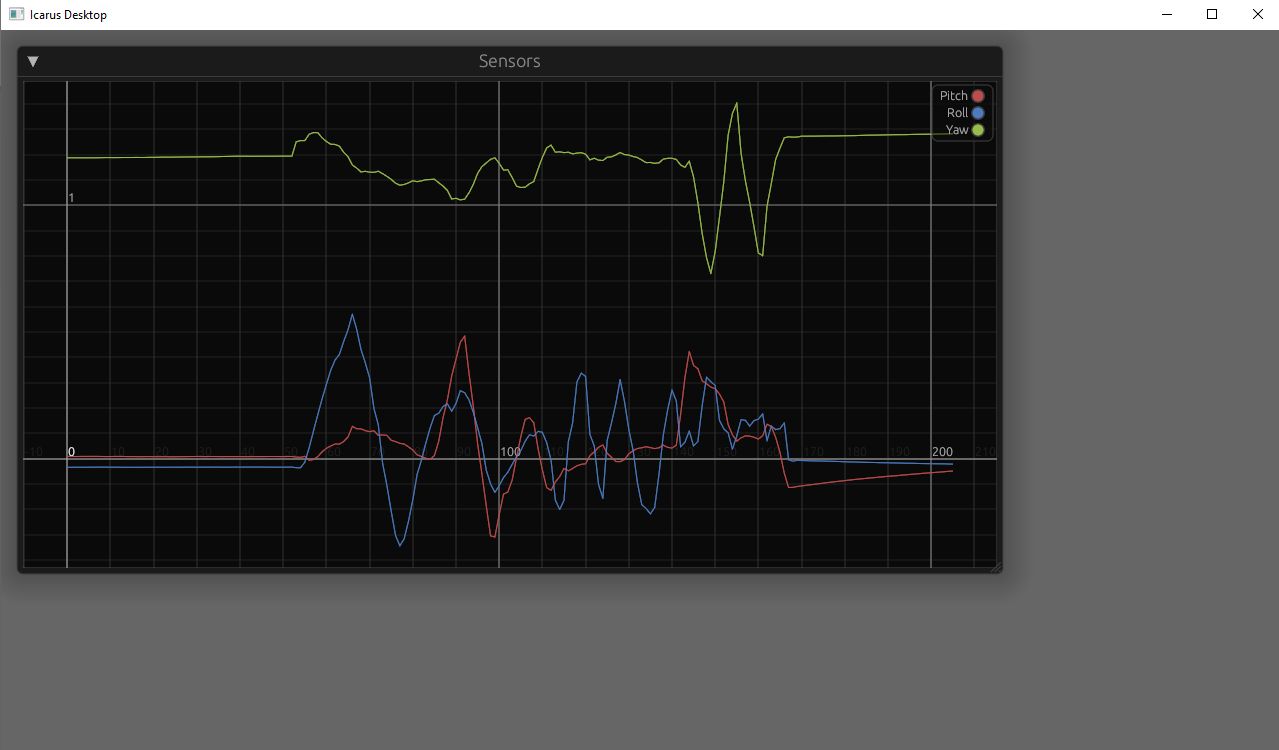
Now that the data is in the system it can be plotted. egui’s plotting library is surprisingly good:
fn ui_system(mut ctx: ResMut<EguiContext>, sensors: Res<Sensors>) {
egui::Window::new("Sensors").show(ctx.ctx_mut(), |ui| {
let (pitch, roll, yaw): (Vec<_>, Vec<_>, Vec<_>) = sensors.attitude
.iter()
.map(|a| (a.pitch as f64, a.roll as f64, a.yaw as f64))
.multiunzip();
let pitch: PlotPoints = pitch.iter().enumerate().map(|(i, &p)| [i as f64, p]).collect();
let roll: PlotPoints = roll.iter().enumerate().map(|(i, &r)| [i as f64, r]).collect();
let yaw: PlotPoints = yaw.iter().enumerate().map(|(i, &y)| [i as f64, y]).collect();
let pitch = Line::new(pitch).name("Pitch");
let roll = Line::new(roll).name("Roll");
let yaw = Line::new(yaw).name("Yaw");
Plot::new("attitude")
.view_aspect(2.0)
.legend(Legend::default())
.show(ui, |plot_ui| {
plot_ui.line(pitch);
plot_ui.line(roll);
plot_ui.line(yaw);
});
});
}
To visualize the orientation of the I added a cube at set its rotation to the last received pitch, roll, yaw:
/// Setup 3D shapes for visualization
fn setup_3d_shapes(mut commands: Commands, mut meshes: ResMut<Assets<Mesh>>, mut mats: ResMut<Assets<StandardMaterial>>) {
let material = mats.add(StandardMaterial {
base_color: Color::rgb(0.7, 0.0, 0.0),
..Default::default()
});
let body_mesh = meshes.add(shape::Cube::default().into());
commands.spawn((
PbrBundle {
mesh: body_mesh.clone(),
material: material,
transform: Transform::from_xyz(0.0, 0.0, 0.0),
..Default::default()
},
FrameBody
));
}
fn update_frame_orientation(sensors: Res<Sensors>, mut query: Query<&mut Transform, With<FrameBody>>) {
if let Some(Attitude { pitch, roll, yaw }) = sensors.attitude.iter().last() {
for mut transform in &mut query {
// Create a new rotation quat
// Note: In the 3D environment Y is "Up".
let mx = Mat4::from_rotation_x(*pitch);
let my = Mat4::from_rotation_y(*yaw);
let mz = Mat4::from_rotation_z(*roll);
let mr = mx * my * mz;
transform.rotation = Quat::from_mat4(&mr);
}
}
}
Future Work
- Plot the other sensors
- Render the step file from KiCAD
- Throttle control (via gamepad)
1 post references this page