Icarus Flight Controller
Drone
Flight Controller
Electronics
STM32
Rust
Embedded
A custom-designed flight controller for micro quadcopters. Features STM32-based design with onboard IMU, magnetometer, and barometer. Supports multiple firmware implementations including Rust and C++.
Overview
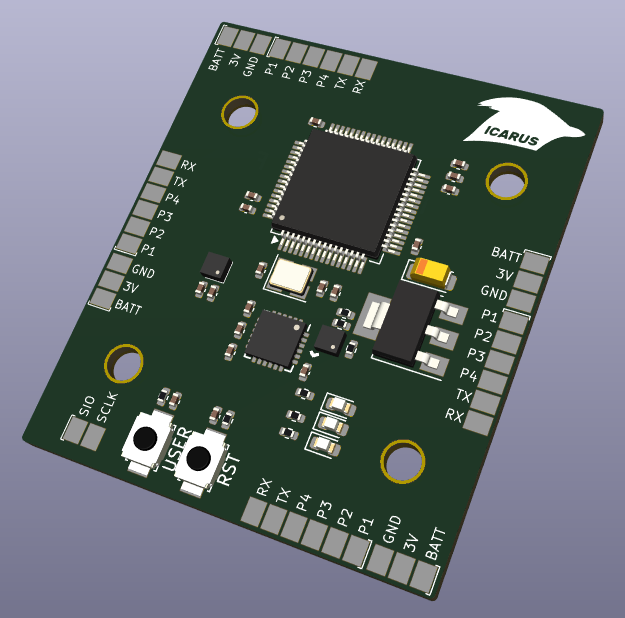
Icarus is a custom-designed flight controller board for micro quadcopters. Originally conceived as a general-purpose PWM controller, the project evolved into a specialized flight controller featuring modern embedded development with both C++ and Rust firmware implementations.
Features
- STM32 microcontroller platform
- Onboard sensors: IMU, Magnetometer, Barometer
- Multiple hardware revisions (Rev A through Rev E+)
- Modular design with separate RC receiver stack
- Custom PCB design
- PID control implementation
- Support for various ESC protocols
Technologies
- STM32 microcontroller
- Rust and C++ firmware
- KiCad for PCB design
- Embedded systems development
- Flight control algorithms
- Sensor fusion
Photo Gallery
Project Timeline
Project Posts
17 postsDrone Assembly.. Again (Icarus Rev E)
icarus
drone
electronics
+2
Icarus Rev E - Firmware Bringup, Part 2
icarus
electronics
rust
+2
Icarus Rev E - Firmware Bringup
icarus
electronics
drone
+2
Icarus Rev E
icarus
flight-controller
electronics
Icarus April 2024 Update
icarus
Icarus PID Tuning
flight-controller
pid
electronics
Icarus In-place testing
icarus
flight-controller
Drone assembly and initial testing
drone
electronics
icarus
Icarus Sensors and Visualization
flight-controller
ble
rust
+4
Icarus Bluetooth Client
flight-controller
ble
arduino
+5
Icarus Frame Design
flight-controller
drone
microquad
+1
Icarus Rev C Bring up
rust
embedded
flight-controller
+3
Icarus Rev C
electronics
kicad
embedded
+2
Icarus Rev B
electronics
Icarus - Application Firmware Setup
rust
embedded
electronics
+1
Icarus Bringup
electronics
firmware
rust
Icarus Controller
electronics
robotics
flight-controller
+1